
東京電力・福島第一原子力発電所の2号機で予定されている、燃料デブリの試験的取り出しをめぐっては、格納容器内部につながる配管に溶けたケーブルが詰まり、ロボットの進路をふさいでいた。
そのため、東京電力は作業の着手を2024年10月末まで延期。
堆積物の除去を進めながら、当初予定していた大型のロボットより狭い範囲を通過できる釣り竿型のロボットを新しく作っていた。
そのなか、5月13日に除去作業が完了し大型ロボットも釣り竿型ロボットも通過できるようになったという。
試験的な取り出しは、当面「釣り竿型」で行うが、大型ロボットでの作業も予定している。
福島第一原発・2号機 堆積物の除去作業が完了 大型・釣り竿型どちらのロボットも使用可能に
5/13(月) 19:30
![]()
関連記事
あわせて読む
-

福島県が東電への訴訟取り下げ 原発事故巡る県職員の人件費 裁判外で東電から賠償可能との提案に同意
福テレNEWS5/29(水)18:25
-

六ケ所再処理工場 日本原燃「計画的に完成させることが使命」 完成時期厳しいがまだ目標を変える時期ではない
ABA青森朝日放送5/29(水)17:15
-

福島第一原発 2号機の“燃料デブリ”試験的な取り出しに向けて 取り出しに使う装置を公開
福島中央テレビニュース5/29(水)12:05
-

「会津本郷焼の魅力」サブスクで知って! 福島県会津美里町の事業協組、飲食店などに貸し出し 産地活性化へ需要開拓
福島民報5/29(水)10:15
-

13年ぶりに見た福島第1原発は…廃炉作業の厳しさ実感 がれきは撤去されたが建屋は当時のまま
東京新聞5/29(水)7:43
-

原電の防潮堤施工不備 水戸市長「下手な工事 情けない」
東京新聞5/29(水)7:40
-

チェルノブイリ、福島第1 原発事故被災地は今 写真家・大石さん講演会 6月1日新宿で
東京新聞5/29(水)7:12
-

<福島第一原発>燃料デブリ「取り出しロボット」公開 2号機での試験的取り出し着手は10月までに
福テレNEWS5/28(火)21:15
-

【5月28日発表】海水と魚のモニタリング結果(福島)
KFB福島放送ニュース5/28(火)19:34
-
-

福島第一原発の燃料デブリ取り出し装置を公開(福島)
KFB福島放送ニュース5/28(火)19:26
-

大気が非常に不安定 警報級の大雨のおそれも 鉄道にも影響 山梨
UTYニュース5/28(火)18:16
-

青森・むつ市の「中間貯蔵施設」安全協定締結に向け 市独自の市民説明会開催へ
ABA青森朝日放送5/28(火)17:50
-

燃料デブリ取り出しへ 新装置を公開 東京電力福島第一原発
テレビユー福島5/28(火)17:50
-

「天空の自然薯」売り出せ 福島県川内村の高田島地区 生産拡大へ種イモ定植
福島民報5/28(火)10:47
-

【霞む最終処分】(43)第7部 原発構内の廃棄物 欠かせぬ減容化加速 前例なき廃炉の鍵に
福島民報5/28(火)10:42
-

2023年度 福島県沿岸漁業26人就業 30代以下8割超 原発事故後で最多
福島民報5/28(火)10:39
-

「取出しロボ」設置の準備を開始 福島第一原発での燃料デブリ取り出しに向け
福テレNEWS5/28(火)10:34
-

6市村、安全対策工事視察 茨城・東海第2原発 首長ら工程の目安望む
茨城新聞5/28(火)10:00
-
北海道/東北の主要なニュース
福島 アクセスランキング
-
1

中学生3人、消火に協力 湯本一中(福島県いわき市)の斎藤さん、館林さん、平子さん 常磐消防署から感謝状
福島民報5/29(水)17:08
-
2

新拠点!ケルヒャー ジャパン仙台支店へmachico編集部が潜入取材
せんだいタウン情報machico5/29(水)15:21
-
3
より良い番組作りに向け 放送番組審議会(福島)
KFB福島放送ニュース5/29(水)17:03
-
4

「はみ出すようにつけると上がって見える」化粧を通じて健康づくり メーカーが美容教室 福島
テレビユー福島5/29(水)16:40
-
5

災害に備え Lアラート全国合同訓練 TUFも参加 福島
テレビユー福島5/29(水)16:54
-
6

元福島第二原発所長、避難者に謝罪も「原発依存度低減」削除求める
朝日新聞5/29(水)17:00
-
7

『しょうがが主役』韓国風おにぎり【しょうが入りチュモッパ】
福島中央テレビニュース5/29(水)15:34
-
8

ワクワクがつまった発想の広場。第10回「こどもの夢ひろば“ボレロ”〜つながる・集まる・羽ばたく〜」8月開催
せんだいタウン情報machico5/29(水)15:55
-
9

【規模を縮小…ホテルなどは誘致せず】JR福島駅前の再開発事業 新たな計画案 事業費550億円〜580億円見込み
福島中央テレビニュース5/29(水)17:37
-
10

福島2人殺害、無期懲役確定へ 最高裁、死刑回避を支持
共同通信5/29(水)17:55
地域 新着ニュース
-

焼けた車に身元不明の遺体 南魚沼市の山中 事件と事故の両面で捜査【新潟・南魚沼市】
UX新潟ニュース5/29(水)18:47
-
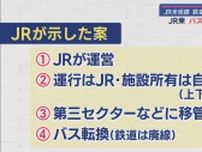
JR米坂線の存続は…JR東日本 バス転換含む4つの復旧案を提示【新潟】
UX新潟ニュース5/29(水)18:47
-

田植えができない…水不足深刻化 悩むコメ農家 — 長岡市が支援策を発表【新潟・長岡市】
UX新潟ニュース5/29(水)18:47
-

JR新潟駅・新飲食エリア『エキナンキッチン』オープン 県内初出店多数で大賑わい【新潟】
UX新潟ニュース5/29(水)18:46
-

県議の海外派遣費用返還求めた住民監査請求を棄却 市民団体「議会側の言い分を丸のみするもので失望」 香川
KSB瀬戸内海放送5/29(水)18:46
-

「名前を付けて!」やんちゃなジャガーの双子の赤ちゃん公開へ《わんぱーくこうち》【高知】
高知さんさんテレビ5/29(水)18:45
-

犯行前日の給料もギャンブルに…「松浦コンビニ強盗殺人未遂事件」被告人質問で犯行動機明かす《長崎》
NIB長崎国際テレビニュース5/29(水)18:44
-

同じ物が続けて出ない?どれくらいのサイクルで入れ替わる? カプセルトイにまつわる疑問【みんなのハテナ】
KSB瀬戸内海放送5/29(水)18:44
-
ヒラメの刺身を食べた11人の女性 寄生虫クドア・セプテンプンクタータによる食中毒 県内でことし初 《新潟》
TeNYテレビ新潟ニュース5/29(水)18:44
-

MRJ撤退からの巻き返しなるか 国産旅客機の開発は愛知で 航空機関連企業の若手30人が勉強会
愛知のニュース(テレビ愛知)5/29(水)18:43
総合 アクセスランキング
-
1

「『自衛隊辞めてしまえ!』などとひたすら罵倒されました…」“大ブレイク芸人”やす子の後輩が“深夜の指導トラブル”を告発!
文春オンライン5/29(水)16:00
-
2

トータス松本、週刊誌報道に「事実を全く認識しておりませんでした」 代表取締役を辞任&事務所謝罪
ORICON NEWS5/29(水)12:50
-
3

一時閉鎖の宮城野部屋から転籍の4力士が引退 日本相撲協会が計12人の引退を発表
デイリースポーツ5/29(水)10:24
-
4

金子恵美氏の〝蓮舫批判〟に米山隆一氏が痛烈皮肉 過去の話持ち出し「片腹痛い」
東スポWEB5/29(水)14:51
-
5

「暴露します」松本人志飲み会参加セクシー女優「衝撃作」発売「言えなくてずっと溜めてた」
日刊スポーツ5/29(水)12:58
-
6

佳子さまのお相手候補「旧華族の御曹司」が直撃取材に漏らした“本音” 「まあ仕方がないかな」
デイリー新潮5/29(水)11:41
-
7

北朝鮮、韓国に汚物入った風船 ビラ散布に対抗か
共同通信5/29(水)12:12
-
8

松本潤の独立で…強まる「嵐」“事実上の解散”の見方と気になるSTARTO社の今後
日刊ゲンダイDIGITAL5/29(水)9:26
-
9

中山秀征 人気芸人との“確執”告白 「楽屋真っ暗…風切る音しか聞こえない」 かみ合わず番組半年で終了
スポニチアネックス5/29(水)11:54
-
10

女子大学生が運転する車が追突…トラックから絵画を下ろす作業していた画家の男性が死亡 2台の間に挟まれる
東海テレビ5/29(水)11:35
東京 新着ニュース





東京 コラム・街ネタ
-

世界で唯一!セサミストリートのオフィシャルストアでワークショップがスタート
Walkerplus5/29(水)17:00
-

早大で「体育各部新入部員パレード・宣誓式」 早稲田通りや早大周辺を行進
みんなの経済新聞ネットワーク5/29(水)17:00
-

仕事、結婚、子育てなどのライフイベントをネットでシミュレーションできる「東京ライフデザインシミュレーター」公開
TOKYO MX+(プラス)5/29(水)17:00
-

U-19日本代表、モーリスレベロに臨む26名を発表!ロス五輪世代のガチメンバー バルサの髙橋仁胡も招集
Qoly5/29(水)16:45
-

長谷部渋谷区長、協定結ぶLINEのイベントに登壇 協力体制「モチベに」
みんなの経済新聞ネットワーク5/29(水)15:45
特集



地域選択
記事検索
掲載情報の著作権は提供元企業等に帰属します。
2024 Fukushima Television Broadcasting